7月112013
0
昔はソースからコンパイルして入れた気がしたけど、Ubuntu12.04LTSはaptからインストールできるようになっていた
sudo apt-get install ibus-mozc
で、再起動
IBusを検索して設定アプリを開く
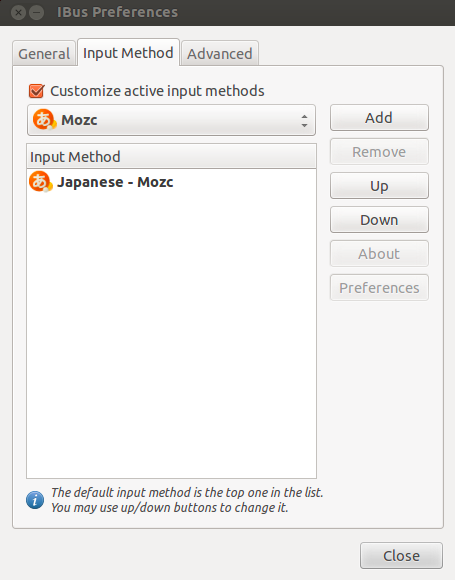
Input MethodにMozcを追加
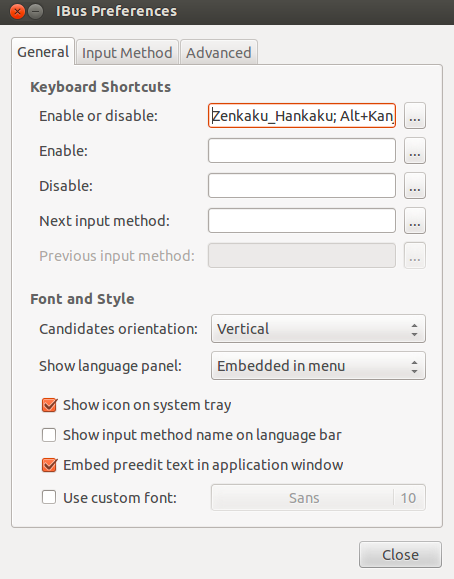
キーボードショートカットは、VirtualBox内のUbuntuなのでMacと衝突しないように英数・かなキーでトグルするように設定した。
昔はソースからコンパイルして入れた気がしたけど、Ubuntu12.04LTSはaptからインストールできるようになっていた
sudo apt-get install ibus-mozc
% sudo foreman export upstart /etc/init --app rocketio-chat --port 4000 -d `pwd` -c web=1 -u `whoami`起動時にwebsocketのportや、RACK_ENVなどを環境変数で渡したいのだが
% sudo service rocketio-chat startkillしたり、OSを再起動しても自動的にプロセスが立ち上がる事を確認する。
% sudo service rocketio-chat stop
% sudo service rocketio-chat restart
start on starting rocketio-chat-web
stop on stopping rocketio-chat-web
respawn
exec su - sho -c 'cd /home/sho/src/sinatra/rocketio-chat-sample; export PORT=4000; bundle exec rackup config.ru -p $PORT >> /var/log/rocketio-chat/web-1.log 2>&1'
rbenv local 2.0.0-p0してruby2.0を使うようにした。
start on starting rocketio-chat-web
stop on stopping rocketio-chat-web
respawn
exec su - sho -c '
cd /home/sho/src/sinatra/rocketio-chat-sample;
export RACK_ENV=production;
export WS_PORT=18080;
export PORT=4000;
/home/sho/.rbenv/shims/bundle exec rackup config.ru -p $PORT >> /var/log/rocketio-chat/web-1.log 2>&1
'
% sudo service rocketio-chat restart
さくらVPSのUbuntu12.04のrvmをrbenvに切り替えた
sudo apt-get install build-essential libreadline-dev libssl-dev
rvm seppuku
sudo rm -rf ~/.rvm
git clone git://github.com/sstephenson/rbenv.git ~/.rbenv
mkdir ~/.rbenv/plugins
git clone git://github.com/sstephenson/ruby-build.git ~/.rbenv/plugins/ruby-build
export PATH=$PATH:$HOME/.rbenv/binと思いきや、screenを起動したりzsh上でzshを起動するとrbenvのパスより上に /usr/local/bin 等が来て、system rubyが使われてしまう現象が起きた。
eval "$(rbenv init -)"
rbenv -v
rbenv install --list | grep 2.0
rbenv install 2.0.0-p0
rbenv global 2.0.0-p02.0になってればok
rbenv rehash
ruby -v
gem update --system
rbenv rehash
gem install rbenv-rehash bundler
rbenv rehash
rbenv install jruby-1.7.3
cd ~/src/jrubyjrubyになっていればおk
rbenv local jruby-1.7.3
rbenv rehash
ruby -v
gem update --systemこのディレクトリの下でだけjrubyが使われるようになる。
rbenv rehash
gem install rbenv-rehash bundler
rbenv rehash
HOME=/home/shokaijruby使うアプリもちゃんとrbenv切り替えて実行してくれてた。
PATH=/home/shokai/.rbenv/shims:/bin:/usr/bin:/usr/sbin:/usr/local/bin:/usr/local/sbin:/home/shokai/bin
*/15 * * * * cd $HOME/src/ruby/twitter-change-profile && ruby change-profile.rb
*/20 * * * * cd $HOME/src/jruby/glitchicon && ruby bin/create_icon.rb $HOME/shokai.png /var/tmp/glitch_icon.png && ruby bin/upload.rb /var/tmp/glitch_icon.png
* * * * * echo $PATH > $HOME/cron-path.txtこういうの登録したらホームディレクトリに環境変数とか書き出す。
* * * * * ruby -v > $HOME/cron-ruby-version.txt
* * * * * cd $HOME/src/jruby && ruby -v > $HOME/cron-jruby-version.txt
#!/bin/sh
exec 2>&1
exec setuidgid sho bash -c '
HOME=/home/shokai
PATH=$HOME/.rbenv/shims:$PATH
cd $HOME/src/sinatra/rocketio-chat-sample
WS_PORT=18080 rackup config.ru -p 4000
'
arduino_firmata
Ubuntu日本語フォーラム / arduino_firmataが動作せず 12.04/12.10
Ubuntu+Arduino UNOで
Resource temporarily unavailable
というエラーがでて動かないらしい
Ubuntu12.04の64bit版をVirtualBoxに入れてみたけど、CDC-ACMなArduinoはどれもデバイスとして認識しなかったのでエラーでるとか以前の問題だった。
VMじゃないUbuntuで試さないとならないっぽい・・
ニッチなgemのわりに毎日100インストールぐらいされてるので、すっかりRubyでArduino使うと定番になってるっぽくて嬉しい。
MacでUbuntuのインストールUSBメモリを作って、ネットブックに入れた。
うちにはCD-Rを焼けるマシンが無い。
デスクトップ版Ubuntu12.04.1のisoファイルをダウンロードしておく
Ubuntu Desktop 日本語 Remix CDのダウンロード | Ubuntu Japanese Team
isoをdmgに変換
hdiutil convert -format UDRW -o ubuntu-ja-12.04.1-desktop-i386.dmg ubuntu-ja-12.04.1-desktop-i386.iso
sudo diskutil umountDisk /dev/disk2
sudo dd if=ubuntu-ja-12.04.1-desktop-i386.dmg of=/dev/rdisk2 bs=1m
sudo diskutil eject /dev/disk2