2週間ぐらい前の事なので曖昧だが、ATmega8のタイマ/カウンタ1で秋月で100円のインクリメンタル型ロータリーエンコーダーを使ってみた。
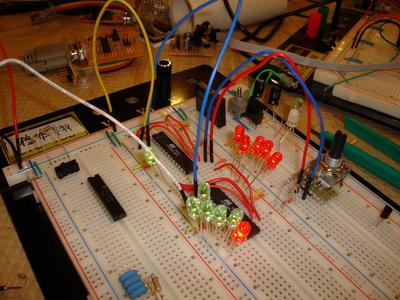
写真下のマイコンは関係無い。
既にTiny26Lでやっている人がいたので参考にしながらさくっと書いた。
→ソースコード(AVR-GCC)
んで数日後に書き直した。
→ソースコード(AVR-GCC)、動画
なんで書き直したかは記憶が定かではないのだが、とりあえず大した違いは無いしどちらも動く。昨日も古い方でデモしてきたばかりだし。
動作設定としてはこんな感じで
/** 動作設定 **/
#define FOSC 8000000 // 8MHz
#define BAUD 9600 // 9600bps
#define MYUBRR FOSC/16/BAUD-1 // UART分周率
volatile char uart_recv_data; // UART受信データ
/** ロータリーエンコーダ設定 **/
volatile char rot_state;
#define ROT_TCNT1 65536-32+1 // 8MHz 1024分周で1ms(1000Hz)
タイマ/カウンタ1を初期化する。main()から1回だけ呼び出す必要がある。
/* タイマ/カウンタ1オーバーフロー割り込み設定 */
void overflow1_init(void){
TCCR1B = (1<<CS12)|(0<<CS11)|(0<<CS10); // 256分周
sbi(TIMSK,TOIE1); // タイマ/カウンタ1オーバーフロー割り込み許可
TCNT1 = ROT_TCNT1; // 1ms毎に割り込み設定(ロータリーエンコーダー用)
}
ロータリーエンコーダー監視スレッド。割り込みなので書いておけば一定時間毎に実行される。
/* タイマ/カウンタ1オーバーフロー割り込み
ロータリーエンコーダー監視用 */
SIGNAL(SIG_OVERFLOW1){
TCNT1 = ROT_TCNT1; // タイマ/カウンタ初期化 1ms毎に割り込み設定
char past_state; // 1回前の状態
past_state = rot_state;
if(bit_is_set(PIND,PD3)){
if(bit_is_set(PIND,PD4)) // HH
rot_state = 1;
else // HL
rot_state = 0;
}
else{
if(bit_is_set(PIND,PD4)) // LH
rot_state = 2;
else // LL
rot_state = 3;
}
if((rot_state+3+1)%3 == past_state){ // 右回り
uart_send_str(&qute;R&qute;);
}
else if((rot_state+3-1)%3 == past_state){ // 左回り
uart_send_str(&qute;L&qute;);
}
}
書いてて10ms毎じゃない気がしてきたが、速い分には問題ないし、他にもタイマを回しているのだったら色々タイミングもずれてくると思うので適宜対処して下さい。
ロータリーエンコーダーの真ん中の足をGNDに接続し、左右の足をそれぞれマイコンのピンに接続。また、左右の足とマイコンのピンの間で、10kΩの抵抗を使ってプルアップする(VCCに接続する)
まあ写真の通り。
インクリメンタル型ロータリーエンコーダーは2本の線で4種類の回転状態を出力する。1クリック回す(カチッと言う)と、4種類の状態が一回りする。
とりあえず状態に0,1,2,3と名前をつけて、10ms毎ぐらいに状態を見に行くと、状態が1増えていたら右に回転、減っていたら左に回転みたいな感じでわかる。
■参考サイト
・113.ロータリーエンコーダを使う
・2343e-conv
・AVR試用記-ロータリーエンコーダ
・ELM – 接点入力と処理のコツ – ロータリーエンコーダの使い方
ところでタイマ/カウンタ、以前書いた時はイマイチわかってなかったのだが、タイマ割り込みが発生するのはTCCNxが8bitなら256、16bitなら65536になった時起こるとの事。つまりタイマ/カウンタオーバーフロー割り込みとはそういう事。
TCCNxが増えるタイミングは分周率(TCCRx)で決まる。64分周だったら、64クロック毎に1増える。分周なし、8、64、256、1024分周まで5段階あるのでそれでタイミングを調節できる。
また、TCCNxに直接書き込み、カウンタの初期値を設定する事もできる。これは割り込みが起こった瞬間に次の割り込みに備えて代入しなおす必要がある。
この2種類の方法で割り込みタイミングを操作する。