8月272009
0
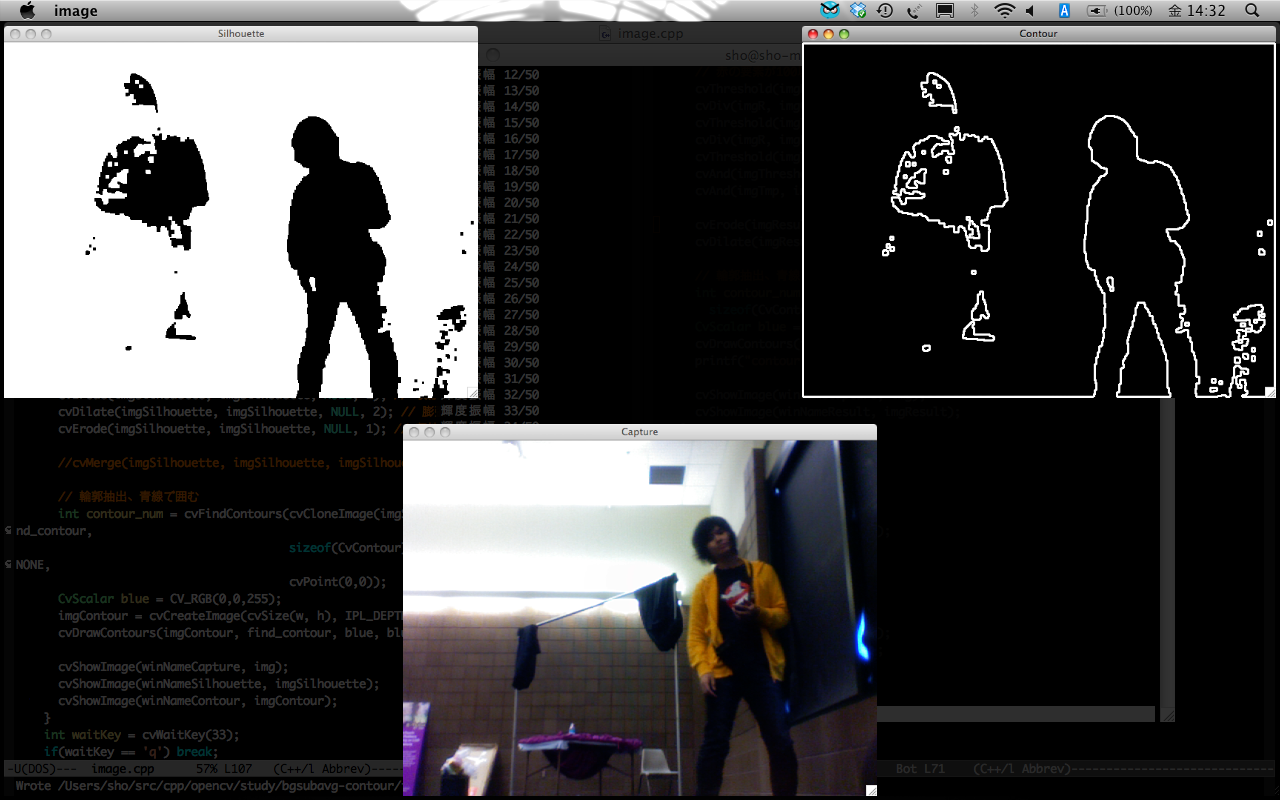
アメリカ出張中に、こういう輪郭だけの表示もありかなと思って作ってみたけどまだ実機で試してないからわからないんだった
そのうちやる。
■ダウンロ〜ド
■参考
この2つを合体させた。
■boostでprintf風の文字列フォーマット
boost::formatを使う。
#include <boost/format.hpp>
using namespace std;
using namespace boost;
const int INIT_TIME = 50;
cout << str(format("輝度平均 %d/%d") % i % INIT_TIME) << endl;
■ソースコード
bgsubavg-contour/image.cpp
#include <cv.h>
#include <highgui.h>
#include <ctype.h>
#include <stdio.h>
#include <iostream>
#include <boost/format.hpp>
using namespace std;
using namespace boost;
int main(int argc, char **argv)
{
const int INIT_TIME = 50;
const double BG_RATIO = 0.02; // 背景領域更新レート
const double OBJ_RATIO = 0.005; // 物体領域更新レート
const double Zeta = 10.0;
IplImage *img = NULL;
CvMemStorage* storage_contour = cvCreateMemStorage(0);
CvSeq* find_contour = NULL;
CvCapture *capture = NULL;
capture = cvCreateCameraCapture(0);
//capture = cvCaptureFromAVI("test.avi");
if(capture == NULL){
cerr << "capture device not found!!" << endl;
return -1;
}
img = cvQueryFrame(capture);
CvSize size = cvSize(img->width, img->height);
IplImage *imgAverage = cvCreateImage(size, IPL_DEPTH_32F, 3);
IplImage *imgSgm = cvCreateImage(size, IPL_DEPTH_32F, 3);
IplImage *imgTmp = cvCreateImage(size, IPL_DEPTH_32F, 3);
IplImage *img_lower = cvCreateImage(size, IPL_DEPTH_32F, 3);
IplImage *img_upper = cvCreateImage(size, IPL_DEPTH_32F, 3);
IplImage *imgSilhouette = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *imgSilhouetteInv = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *imgResult = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *imgContour = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *imgSilhouette_p = cvCreateImage(size, IPL_DEPTH_8U, 1);
cout << "背景初期化中..." << endl;
cvSetZero(imgAverage);
for(int i = 0; i < INIT_TIME; i++){
img = cvQueryFrame(capture);
cvAcc(img, imgAverage);
cout << str(format("輝度平均 %d/%d") % i % INIT_TIME) << endl;
}
cvConvertScale(imgAverage, imgAverage, 1.0 / INIT_TIME);
cvSetZero(imgSgm);
for(int i = 0; i < INIT_TIME; i++){
img = cvQueryFrame(capture);
cvConvert(img, imgTmp);
cvSub(imgTmp, imgAverage, imgTmp);
cvPow(imgTmp, imgTmp, 2.0);
cvConvertScale(imgTmp, imgTmp, 2.0);
cvPow(imgTmp, imgTmp, 0.5);
cvAcc(imgTmp, imgSgm);
cout << str(format("輝度振幅 %d/%d") % i % INIT_TIME) << endl;
}
cvConvertScale(imgSgm, imgSgm, 1.0 / INIT_TIME);
cout << "背景初期化完了" << endl;
char winNameCapture[] = "Capture";
char winNameSilhouette[] = "Silhouette";
char winNameContour[] = "Contour";
cvNamedWindow(winNameCapture, CV_WINDOW_AUTOSIZE);
cvNamedWindow(winNameSilhouette, CV_WINDOW_AUTOSIZE);
cvNamedWindow(winNameContour, CV_WINDOW_AUTOSIZE);
bool isStop = false;
while(1){
if(!isStop){
img = cvQueryFrame(capture);
if(img == NULL) break;
cvConvert(img, imgTmp);
// 輝度範囲
cvSub(imgAverage, imgSgm, img_lower);
cvSubS(img_lower, cvScalarAll(Zeta), img_lower);
cvAdd(imgAverage, imgSgm, img_upper);
cvAddS(img_upper, cvScalarAll(Zeta), img_upper);
cvInRange(imgTmp, img_lower, img_upper, imgSilhouette);
// 輝度振幅
cvSub(imgTmp, imgAverage, imgTmp);
cvPow(imgTmp, imgTmp, 2.0);
cvConvertScale(imgTmp, imgTmp, 2.0);
cvPow(imgTmp, imgTmp, 0.5);
// 背景領域を更新
cvRunningAvg(img, imgAverage, BG_RATIO, imgSilhouette);
cvRunningAvg(imgTmp, imgSgm, BG_RATIO, imgSilhouette);
// 物体領域を更新
cvNot(imgSilhouette, imgSilhouetteInv);
cvRunningAvg(imgTmp, imgSgm, OBJ_RATIO, imgSilhouetteInv);
cvErode(imgSilhouette, imgSilhouette, NULL, 2); // 収縮
cvDilate(imgSilhouette, imgSilhouette, NULL, 4); // 膨張
cvErode(imgSilhouette, imgSilhouette, NULL, 2); // 収縮
cvAnd(imgSilhouette, imgSilhouette_p, imgResult);
// 輪郭抽出、青線で囲む
int contour_num = cvFindContours(cvCloneImage(imgResult), storage_contour, &find_contour,
sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_NONE,
cvPoint(0,0));
CvScalar white = CV_RGB(255,255,255);
cvSetZero(imgContour);
cvDrawContours(imgContour, find_contour, white, white, 2, 2, 8, cvPoint(0,0));
cvNot(imgContour, imgContour);
cvShowImage(winNameCapture, img);
cvShowImage(winNameSilhouette, imgResult);
cvShowImage(winNameContour, imgContour);
cvCopy(imgSilhouette, imgSilhouette_p);
}
int waitKey = cvWaitKey(33);
if(waitKey == 'q') break;
if(waitKey == ' '){
isStop = !isStop;
if(isStop) cout << "stop" << endl;
else cout << "start" << endl;
}
}
cvReleaseCapture(&capture);
cvDestroyWindow(winNameCapture);
cvDestroyWindow(winNameSilhouette);
cvDestroyWindow(winNameContour);
return 0;
}
Makefile
SRC = image.cpp
DST = image
prefix=/opt/local
INCPATH=$(prefix)/include
LIBPATH=$(prefix)/lib
OPT= -lcv -lcvaux -lcxcore -lhighgui
CC=g++ -O
CFLAGS= -I$(INCPATH)/opencv
LDFLAGS=-L. -L$(LIBPATH)
all:
$(CC) $(SRC) -o $(DST) $(CFLAGS) $(LDFLAGS) $(OPT)