ここまで書いてアレだけど、Exif情報に位置情報を入れてアップロードしても、FlickrAPIからアクセスできるlocation情報に書き込まれるだけでmachine tagとしてGeoTagが付加されるわけでは無いのね…
それでもkmlは出せるけど、やっぱGeoTagにしたいなあ。
後でツール作るか。
———————————
SONY GPS-CS1Kを使って写真のexifに経度緯度情報(ジオタグ)を埋め込むのがすごく楽しい – hatayanlogを読んだら欲しくなったのでAmazonで買った。
hatayanlogでは色々細かく書いてあるが、俺はPicasaとGMM2は使ってない。
ようするにこのGPSを
1.ただ電源を入れて持ち歩くと、位置情報と時刻のデータベースができる
2.デジカメで写真を撮る
3.PC上でGPSデータとデジカメの写真を、撮影日時を元に合体させる
4.Flickrにアップロードする
5.Flickrが位置情報付き写真リスト(kml形式)を自動的に出してくれる
6.GoogleEarthやGoogleMapはkmlを読み込める
という事。
このGPSにはインタフェースが電源ボタンと状態表示のLED、USBポートしかない。本当にただ位置と時刻のペアを記録するだけのデバイス。
だが、日常的にFlickrを使ってる人にとっては、まさに使っている事を意識する事無く、位置情報とのmashupによって新しい価値が付加される素晴らしいデバイスだ。
データがテキスト形式で入っているのでhackもやりやすい。
(この形式で入ってる→s.h.log: Arduino – 偽GPS)
GoogleMapの場合、Flickrの自分のページの下にあるkml形式のfeedをGoogleMapの検索窓に打ち込めば表示できる
→俺のkml
拡大地図を表示
(ただし、俺の場合学校で撮る写真が多いのでずっと同じ場所が表示されているかも知れない)
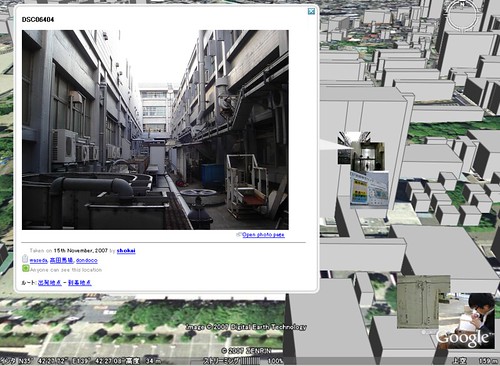
同じkmlをGoogleEarthで見た所。これはこないだ行った早稲田の理工学部
■まず買う
Amazonが安かったので買った。

売り上げランキング: 1277

 悪くはないが、GPSロガーとしては、いまやでかすぎだし付属ソフトも弱い
悪くはないが、GPSロガーとしては、いまやでかすぎだし付属ソフトも弱い 気になったら買うべし! 非常に手軽に使えます。
気になったら買うべし! 非常に手軽に使えます。