XPort-03RのTCP/IPのポートを開いて、socket通信をマイコンに伝える設定をした。
XPortは3Vで動くので、その動かし方やパソコン側にインストールする設定ソフトについては
s.h.log: XPort-03Rを動かしてみた
ismlog XPort①
を参照。
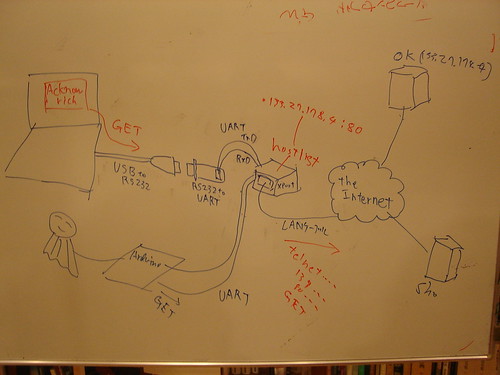
ハードウェアはこんな感じ。自分のパソコンと同じLANにLANケーブルで接続されたXPort(Ethernet-UART変換器)に、ADM3202で自作したUART-RS232C変換器をつけて、そのRS232Cをパソコンのシリアルポートに戻している。
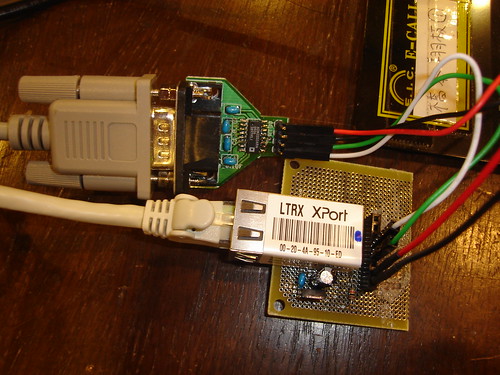
XPortのIPアドレスは192.168.0.180を割り当てた。
XPortは3Vで動かしている。
ADM3202はブレッドボードから供給されている5Vで動いている。両者の間のUARTは、3Vと5Vだけども問題なく動いている。
もちろんGNDは共有する。
ちょっと違うけどこういう状態になっている。
■XPortの設定
XPortのweb設定画面から、シリアルポートの設定を行なう
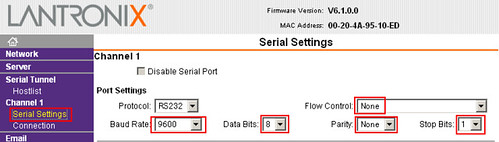
「9600bps/8bit/パリティ無し/ストップビット1/フロー制御無し」
にする。画面下の「OK」を押す。
さらに、Connectionの設定。
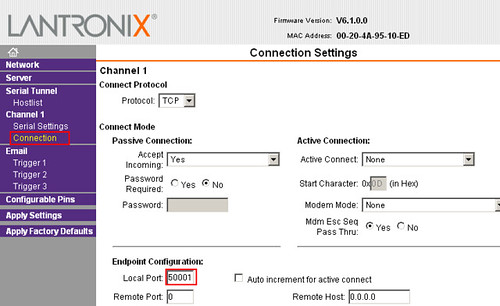
Local Portだけ設定する。とりあえず50001を指定してみた。(たしか50000番以降はユーザが自由に使って良いポートだったと思う)
他は初期設定のままで変えない。画面下の「OK」を押す。
その後、画面左下の「Apply Settings」を押すと、しばらくかかって設定が反映される。
■XPortを試す
Ethernet-RS232C変換の接続がされているか試す。
まず、適当なシリアルコンソール用ソフトを開いて、「9600bps/8bit/パリティ無し/ストップビット1/フロー制御無し」に設定する。今回もAcknowrichを使った。
そして、今回のXPortのIPアドレスは192.168.0.180なので、
コマンドプロンプト(Windowsの「ファイル名を指定して実行」で「cmd」で実行)で、
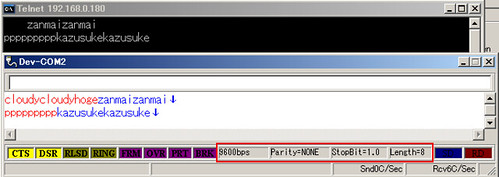
telnet 192.168.0.180 50001
すると、socketで接続される。
どちらからでも文字を打つと、もう一方に送信される。
これでtelnetでの接続が確認出来たということは、IO::Socketなんかを使うとマイコンとPerlをTCP/IP越しのソケット通信で接続出来るってことだな。やってみる。
※ちなみにAcknowrichは、Shift+Enterを押さないと実際に送信しない。普通にEnterだけだと送信バッファに溜めるだけで実際に送信しないので注意。