8月102013
0
地味にbug取ったりアップデートし続けて、今 v0.4.8です
Tw: Twitter client on Ruby.
インストール
gem install tw
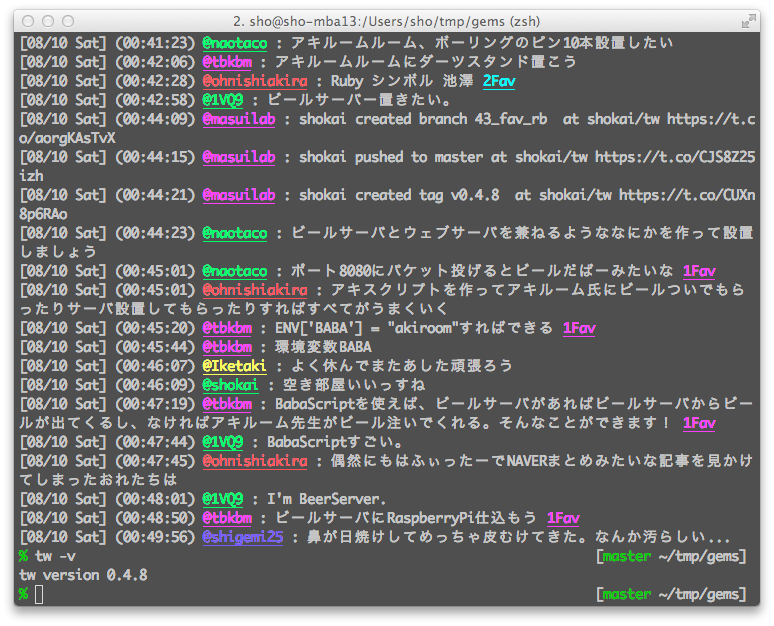
CUIなので、邪魔じゃなく表示できるか不安で機能追加には消極的なんだけど、Fav数/RT数表示してみたら問題なかったのでリリースした。
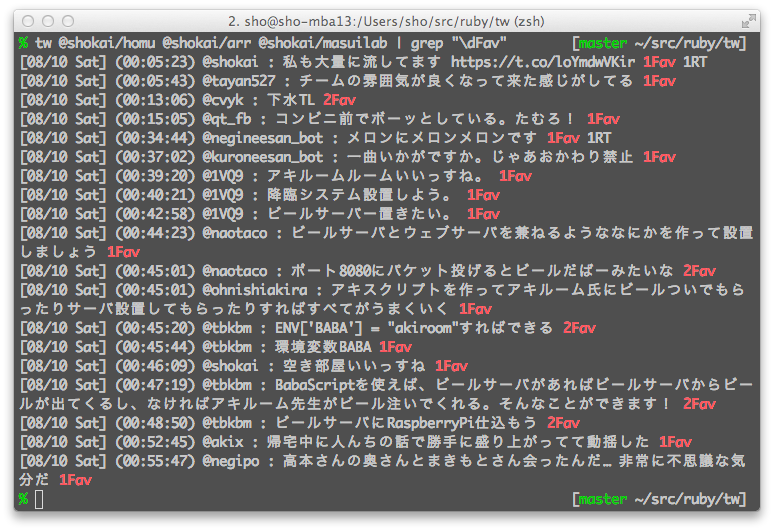
grepもできる
地味にbug取ったりアップデートし続けて、今 v0.4.8です
Tw: Twitter client on Ruby.
インストール
gem install tw
今日やりました。夏休みだというのにたくさん人が来た。OBも来た。
増井研ではRubyは決してもう熱い最新の言語というより成熟した言語という感じで見られていて、実際若者は皆Node.jsを使っています。
でも俺はRubyの書き心地が好きなので、Rubyのどのへんが使ってて好きかをスライドにまとめてみました。なんかRuby書いてると、UIの使い勝手を地味に上げている時と同じあたりの脳の部位が活性化してて気分がいい。
明日8/5(月) 14:00〜 SFCデルタ棟S112でやります
これの続き的な位置づけです → Ruby初級入門という勉強会やりました
主題:gemやアプリ内ライブラリを作る時に気をつけている事
コンテンツ
アプリ内ライブラリの作り方・gemの作り方
サンプルコードとテスト
ライブラリのデザイン
API
DSL
泥臭い小手先の技
例外・エラーの通知
ドキュメント
私以外に、RubyでIME作ってる人や、nodeのすごいconnectミドルウェアの人、babascriptのVMがいると思います
マルかくとreblog、空中タップで下に進む。腕が疲れる。
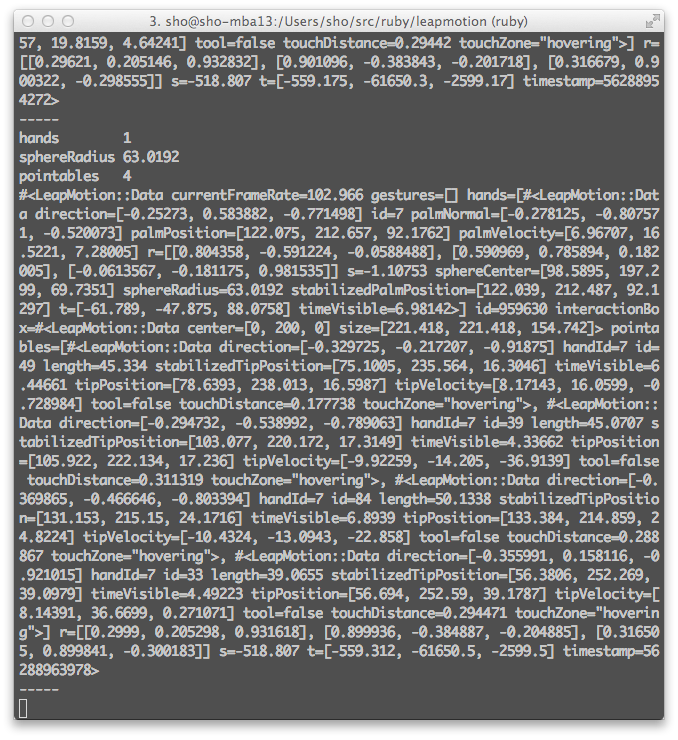
研究室にleapmotionがあったのでかずすけ食べながらbabaくんと仕様を検討し、rubyから使うためにgemを作った。
gem install leapmotion
require 'rubygems'
require 'leapmotion'
leap = LeapMotion.connect
leap.on :connect do
puts "connect"
end
leap.on :data do |data|
puts "hands #{data.hands.size}"
puts "pointables #{data.pointables.size}"
puts data
puts "-"*5
end
leap.on :disconnect do
puts "disconnect"
exit
end
leap.wait
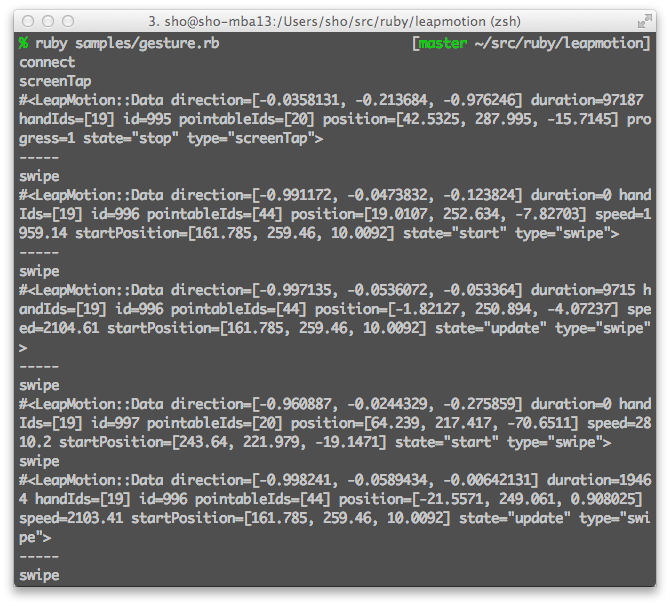
leap = LeapMotion.connect :gestures => true
leap.on :gestures do |gestures|
gestures.each do |g|
puts g.type # => "circle", "screenTap", "keyTap", "swipe"
puts g
end
puts "-"*5
end
leap.wait
(追記)色々改良された → ArduinoとRubyで赤外線リモコン をgemにした
————-
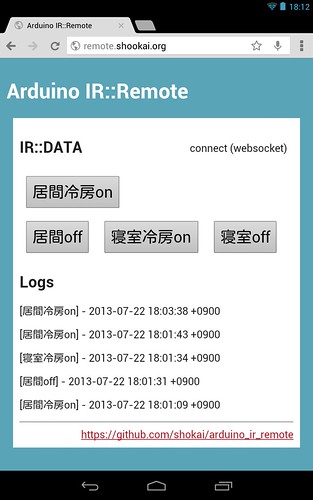
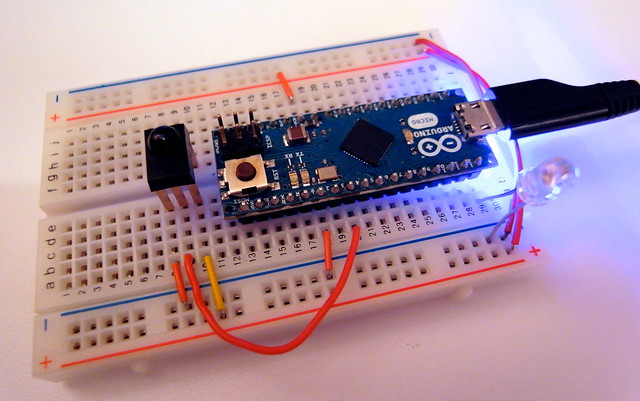
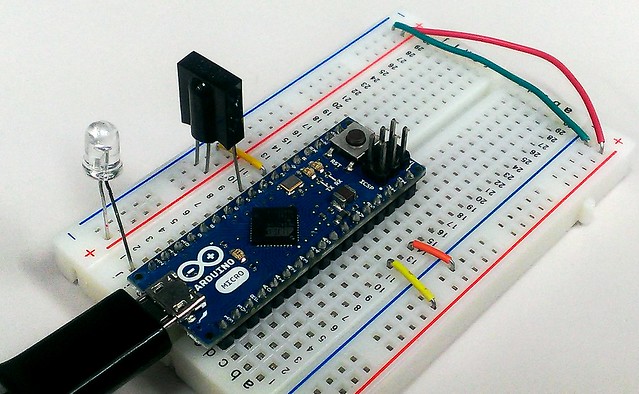
帰宅前にスマホからクーラーをつけれるようにした。Arduinoと合計150円ぐらいの部品と、このRubyで書いたアプリ https://github.com/shokai/arduino_ir_remote だけで使える。
ソフトウェア部分はまだアップデートされるだろうけど、(rubygemにするとか)ハードウェアはもうこれ以上変更しないので是非自作してお試しください。
動かなかったり欠陥があったら、githubのissueかtwitterで@shokaiにどうぞ。

ruby bin/arduino_ir_remote /dev/tty.usb-devicename
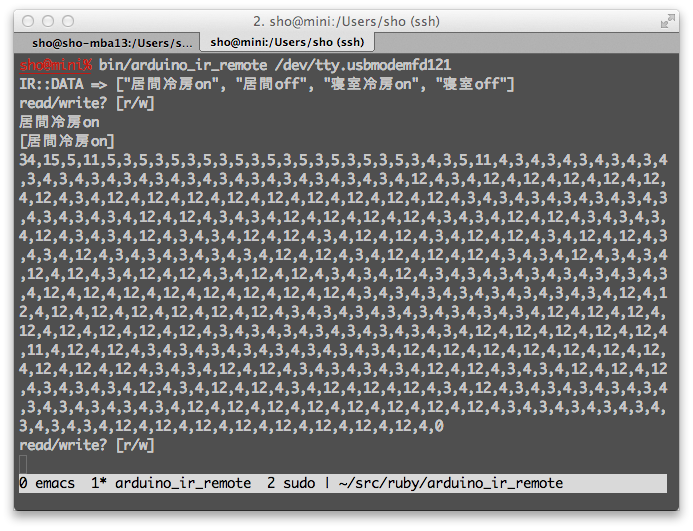
"on" : "34,15,5,11,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,4,3,5,11,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,3,4,12,4,12,4,12,4,12,4,3,4,3,4,12,4,12,4,3,4,3,4,3,4,12,4,3,4,3,4,12,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,11,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,12,4,12,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,3,4,12,4,12,4,12,4,3,4,3,4,3,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,12,4,3,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,0"
"off" : "34,15,5,11,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,5,3,4,11,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,3,4,12,4,12,4,12,4,12,4,3,4,3,4,12,4,11,4,3,4,3,4,3,4,12,4,3,4,3,4,12,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,12,4,12,4,3,4,3,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,12,4,12,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,3,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,3,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,3,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,12,4,0"