BeagleBoardはTIの作ったオープンソースハードウェア。こっそり春頃からいじっていたんだけど書いてなかった。
スペックに難はあるが、ディスプレイとサウンド出力つきの組み込み環境が俺でも作れるのは魅力。作品のレベルをプロダクトに近い所まで引き上げられる。
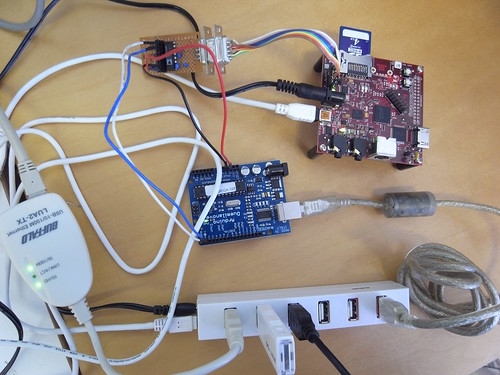
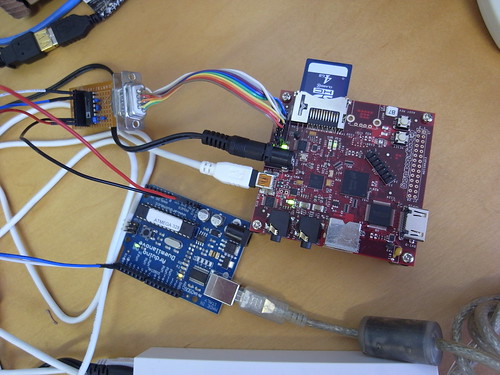
最近CRESTでのプロジェクト用にARM版Ubuntu9.04をbuildしてインストールして、Arduinoと接続する所までやったので書いておこう。
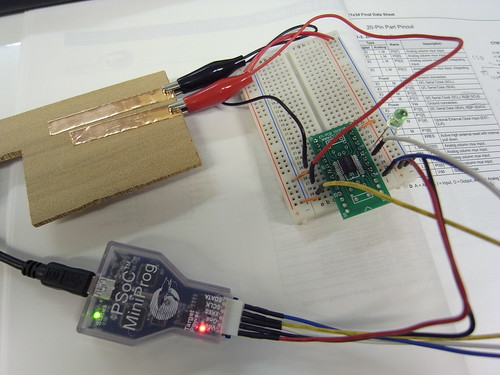
今はApache2とruby1.8.7(いずれもaptでインストールした)を使って、外付けしたArduinoとmoxaからデータを読み取っている。とりあえず大学院棟の明るさをCdSで取得してwebに公開している → http://shokai-b.mag.keio.ac.jp/light
■準備
BeagleBoardと、インストール時にパソコンとBeagleBoard間でシリアルコンソールを使うのに必要なBeagleケーブルはdigikeyで購入できる。他の部品は国内で全て入手可能。

■Ubuntu9.04をBeagleBoardにインストール
OSはSDカードにインストールする。
最初デスクトップ版をインストールしてみたけど重すぎた。AngstromやHandheld Mojoならそれなりに動くけど、フルのUbuntuデスクトップはウィンドウマネージャをtwmにしても無理だった。
今回の用途にはCUIがあれば十分だったので、最低限のbuildツールを含んだARM用イメージを作って起動させた。
なお作業はext3のファイルシステムが読み書きできる必要があるので全て別のUbuntu Desktopで行った。
- BeagleBoardにUbuntu Desktop版インストール – 橋本詳解
- BeagleBoardにUbuntuセットアップ(GUIなし)、sshdを入れてリモートログインしてみる – 橋本詳解
- いろいろインストールして環境を整える – 橋本詳解
- Rubyまわりをインストール – 橋本詳解
これで、ApacheやRubyやsshdはもちろん、emacsと各種elisp、gemとeasy_install、rails2やsinatra、mongrel_clusterとapache2でmod_proxy_balancerなどがaptとgemでさくっとインストールできた。
このへんのサーバサイドアプリ開発環境のセットアップの容易さはubuntuさすが。
処理速度は体感でDebian化した白箱より速い。SDカードなのであまりR/Wしたくないがたぶん外付けUSB-HDDも認識できるんじゃないだろうか。そうすると、クローラ作ったり簡単なbotを動かす程度の俺は自宅サーバ環境はBeagleBoardで十分という可能性もある。
処理速度とストレージ読み書きに不安はあるが小型かつバッテリーでも動かせるUbuntu Linux環境ができた。
■Arduino / moxaとの通信
BeagleBoard基板上のシリアルコンソールに使ったポートをArduinoやmoxaとの通信を使った。
本当はUSBで接続したかったけどできなかった。
FTDIチップのドライバはaptでインストールできるが、USBに接続しても認識されない(/dev/ttyUSB0に現れない)
同じバージョンのUbuntuデスクトップを別のAMD64マシンで用意して、同じようにセットアップをしたがこちらは認識した。ARM版Ubuntuが何かおかしいのかもしれない。
64bitAMDマシンではlsmodした時にFTDIチップを監視してるプロセスがいるんだけど、BeagleBoardではlsmodしてもいない。
誰かLinux詳しい人教えてくれるとうれしいです・・・
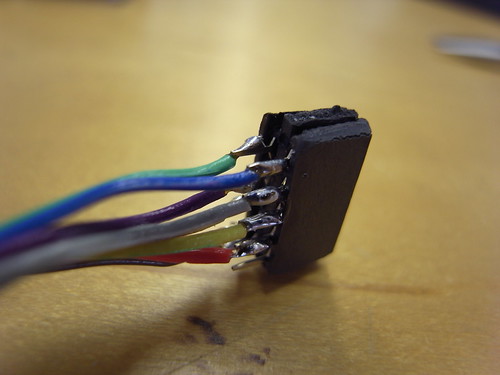
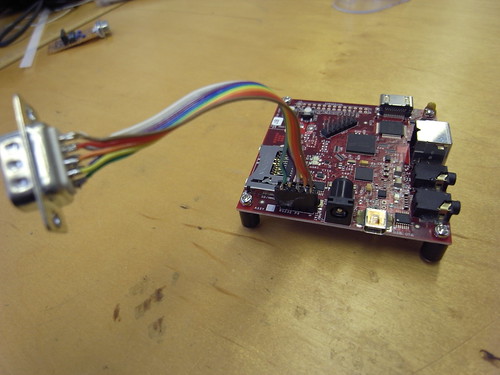
しかたないのでセットアップに使ったBeagleケーブルのオス版を作って通信に使う。
シリアルポートの9つのピンにはよく見ると番号が振ってあり、それをBeagleBoardの基板上の1~9ピン(10は無視する)と接続する。
シリアルポート側は
12345
6789
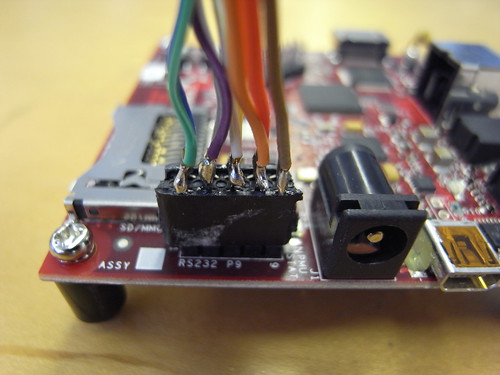
のようになるが、BeagleBoard上のコネクタは
13579
2468
となっているのでとても捻れる。気合いではんだづけする。基板上のシルク印刷をよく見てね。

これで、Arduinoの外側にあるRX / TXピンにMAX232(ADM3202)を接続すればBeagleBoardとシリアル通信できる。
ArduinoにCdS(明るさのセンサ)なんかを接続して数値をBeagleBoardに送り続ければいい。
/etc/event.d/ttyS2 を削除して再起動すると、/dev/ttyS2がシリアルコンソールではなくシリアルポートとして開ける。
screen /dev/ttyS2
でモニタできる。
UNIX系なので、シリアルポートもFileとして簡単に読み出せた。
Arduino + BeagleBoard(Ubuntu) シリアルポートを読んでたまにファイルに書き出す – 橋本詳解
通信できる手段が整えばあとは好きにできる。