10月052009
0
オプティカルフローのサンプルコードをちょっといじって、カメラからの入力を表示してみた。
ブロックマッチングによるオプティカルフローを使った。
できたソースコード、Makefile
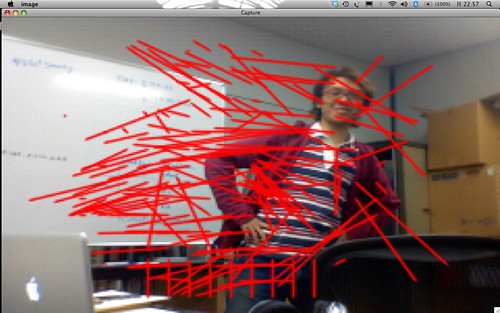
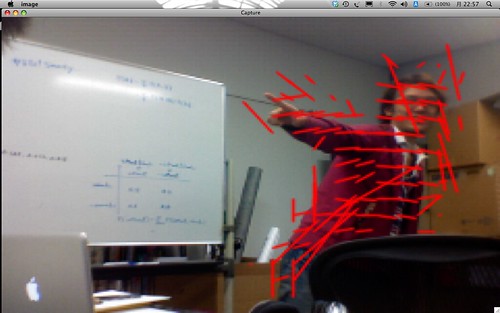
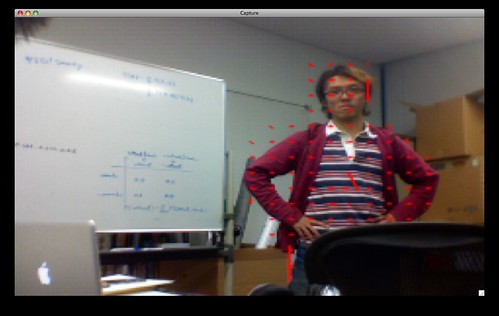
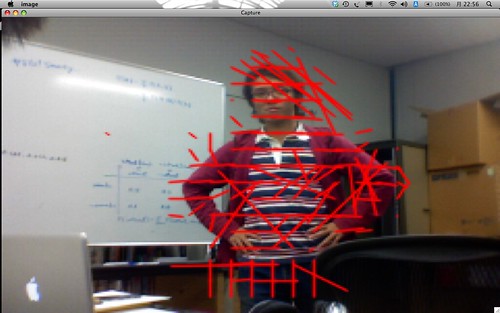
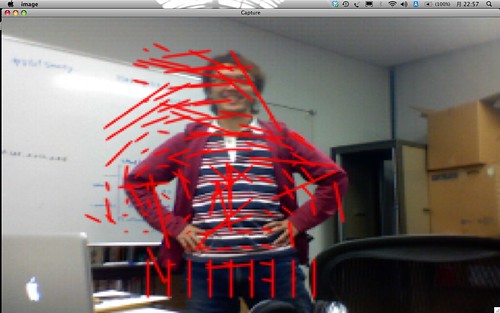
image.cpp
#include <cv.h>
#include <highgui.h>
#include <cxcore.h>
#include <ctype.h>
#include <stdio.h>
#include <iostream>
#include <boost/format.hpp>
using namespace std;
using namespace boost;
void detect_flow(IplImage *img, IplImage *img_p, IplImage *dst);
int main(int argc, char* argv[]) {
IplImage *img = NULL;
CvCapture *capture = NULL;
capture = cvCreateCameraCapture(0);
//capture = cvCaptureFromAVI("test.avi");
if(capture == NULL){
cerr << "capture device not found!!" << endl;
return -1;
}
CvSize size = cvSize(240, 180);
IplImage *img_resized = cvCreateImage(size, IPL_DEPTH_8U, 3);
IplImage *img_gray = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *img_gray_p = cvCreateImage(size, IPL_DEPTH_8U, 1);
IplImage *img_dst = cvCreateImage(size, IPL_DEPTH_8U, 3);
char winNameCapture[] = "Capture";
cvNamedWindow(winNameCapture, CV_WINDOW_AUTOSIZE);
while (1) {
img = cvQueryFrame(capture);
cvResize(img, img_resized);
cvCvtColor(img_resized, img_gray, CV_BGR2GRAY);
cvCopy(img_resized, img_dst);
detect_flow(img_gray, img_gray_p, img_dst);
cvShowImage(winNameCapture, img_dst);
cvCopy(img_gray, img_gray_p);
if (cvWaitKey(10) == 'q') break;
}
cvReleaseCapture(&capture);
cvDestroyWindow(winNameCapture);
return 0;
}
void detect_flow(IplImage *src_img1, IplImage *src_img2, IplImage *dst_img){
int i, j, dx, dy, rows, cols;
int block_size = 10;
int shift_size = 1;
CvMat *velx, *vely;
CvSize block = cvSize(block_size, block_size);
CvSize shift = cvSize(shift_size, shift_size);
CvSize max_range = cvSize(50, 50);
rows = int(ceil (double (src_img1->height) / block_size));
cols = int(ceil (double (src_img1->width) / block_size));
velx = cvCreateMat(rows, cols, CV_32FC1);
vely = cvCreateMat(rows, cols, CV_32FC1);
cvSetZero(velx);
cvSetZero(vely);
cvCalcOpticalFlowBM(src_img1, src_img2, block, shift, max_range, 0, velx, vely);
for (i = 0; i < velx->width; i++) {
for (j = 0; j < vely->height; j++) {
dx = (int)cvGetReal2D(velx, j, i);
dy = (int)cvGetReal2D(vely, j, i);
cvLine(dst_img, cvPoint(i * block_size, j * block_size),
cvPoint(i * block_size + dx, j * block_size + dy), CV_RGB(255, 0, 0), 1, CV_AA, 0);
}
}
}
Makefile
SRC = image.cpp
DST = image
prefix=/opt/local
INCPATH=$(prefix)/include
LIBPATH=$(prefix)/lib
OPT= -lcv -lcvaux -lcxcore -lhighgui
CC=g++ -O
CFLAGS= -I$(INCPATH)/opencv
LDFLAGS=-L. -L$(LIBPATH)
all:
$(CC) $(SRC) -o $(DST) $(CFLAGS) $(LDFLAGS) $(OPT)